简介
RGB-D相机是一款具有RGB功能的3D TOF摄像机模组,具有深度测量和RGB图像捕捉能力。其只需要使用USB数据线即可以30fps的速度输出TOF深度数据和RGB图像获,使用网页上位机,可快速预览深度图、点云图数据和实时彩色3D显示,支持Linux免驱即插即用。其支持ROS1/2,开放接入包及例程,开放Python SDK,可通过获得的点云数据实现3D人脸识别,机械臂抓取,slam映射等。
适用于物联网应用的一体化、低成本、灵活易用的3D ToF(飞行时间)解决方案。它集成了以下算法:具体应用于测距、多区域人体定位传感、姿势监测、姿势控制、关键校正等。这些功能被广泛应用于白色家电、激光电视、智能投影仪、智能照明、智能停车、智能家居设施等众多应用中。

快速了解ToF技术
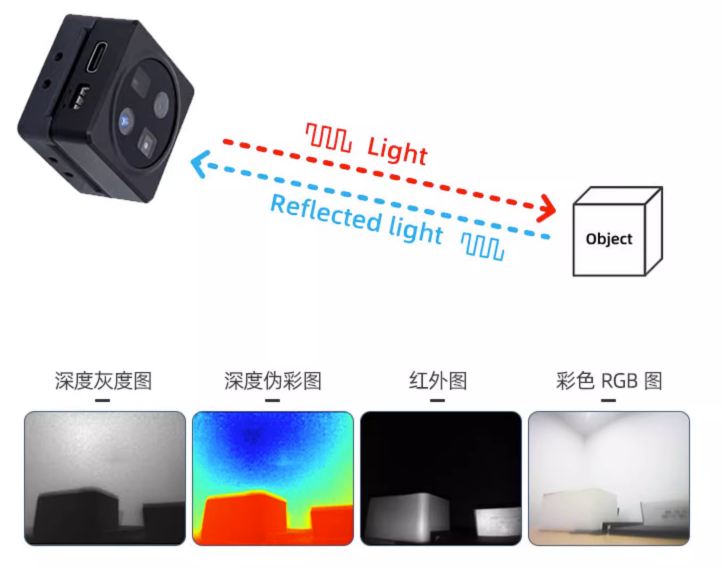
ToF:是一种距离测量的方法,通过测量发射器和反射器之间的超声波/微波/光等信号的“飞行时间”来计算两者之间的距离,可以实现ToF测距的是ToF传感器。最常用的是红外线或激光测距。
物体之间的距离存在差异。该模块通过捕获的深度值的差异来显示冷色和暖色。冷暖色随着距离的映射而变化,距离越近色调呈暖调(橘红)而越远色调呈冷调(蓝色)。
应用场景
- SLAM和机器人导航
- 监视和安全检查
- 人员和尾随检测
- VR/AR和手势识别
- 自动驾驶仪和AGV避障器
- 三维建模
- 尺寸测量
- 活性检测和面部识别
技术规格
- 处理器:Cortex A7@1.5GHz with 0.4T NPU
- 存储:128MB RAM,128MB ROM
- 电源电压:5V/0.5A
- 检测距离:0.2~2m
- 分辨率
- Depth:320 x 240@30fps
- RGB:800×600@30fps
- 外部接口
- UART(1.25mm)
- USB2.0(Type-C)
- 显示:Web browser:Depth/IR/RGB/Point cloud
- 数据通道:usb虚拟网络:web服务
- ROS:支持ROS1/ROS2
- FOV
- TOF 55°(H) x 72°(V)
- RGB 78°(H)×98°(V)
- SDK:python SDK和代码
- 工作温度:-20~+50℃
- 尺寸:36*36*13.5 mm
- 重量:About 124g
配送清单
- 串口线1.25mm转2.54mm 4Pin×1
- USB Type-C数据线×1
- 三脚架支架×1
- RGB-D相机×1
- 散热器×1
documentstart
相关文档
documentsend
 全部商品分类﹀
全部商品分类﹀














