简介
![ABGTABH520]{_@32M1SWLXO.png](https://ws.dfrobot.com.cn/FuoQf6YObeZvEM71REGGVl2Yilbb)
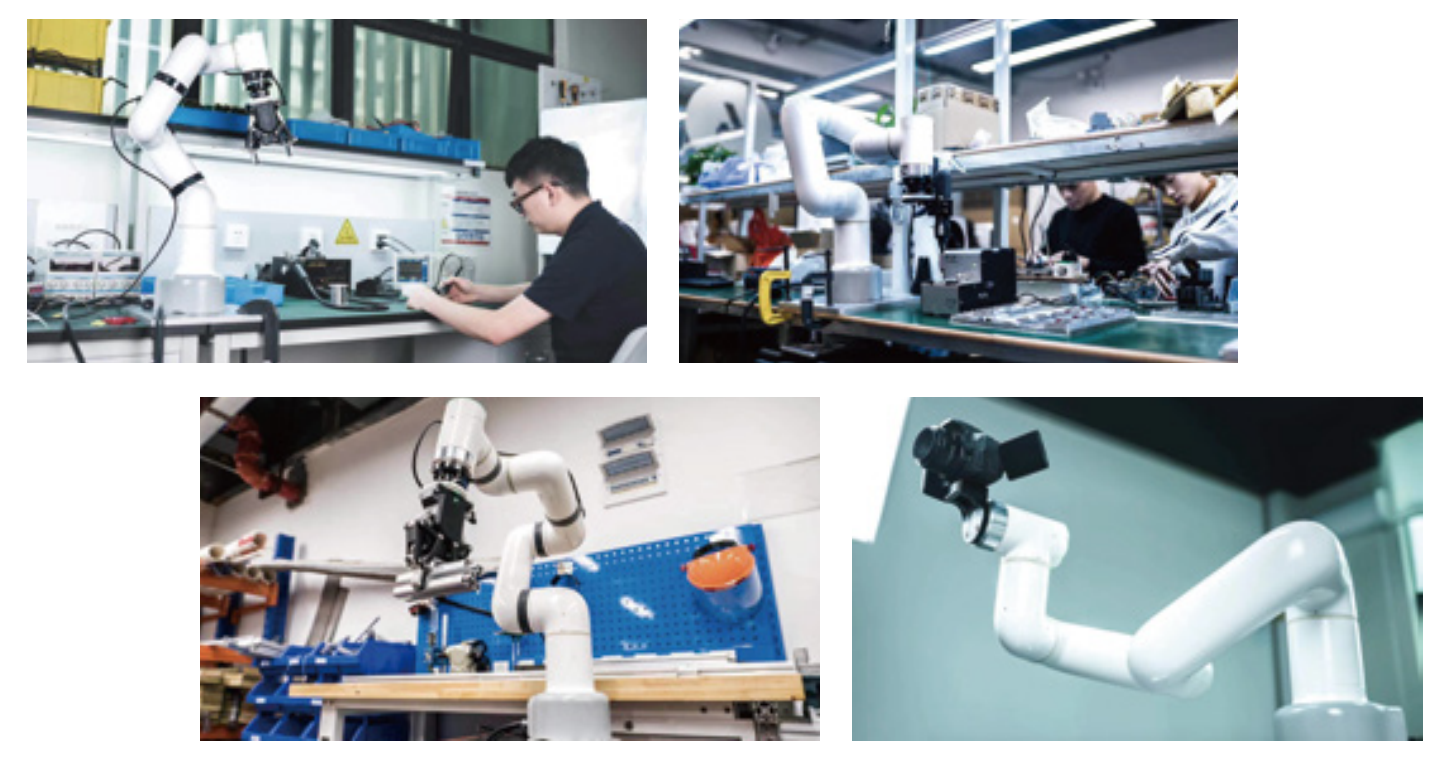
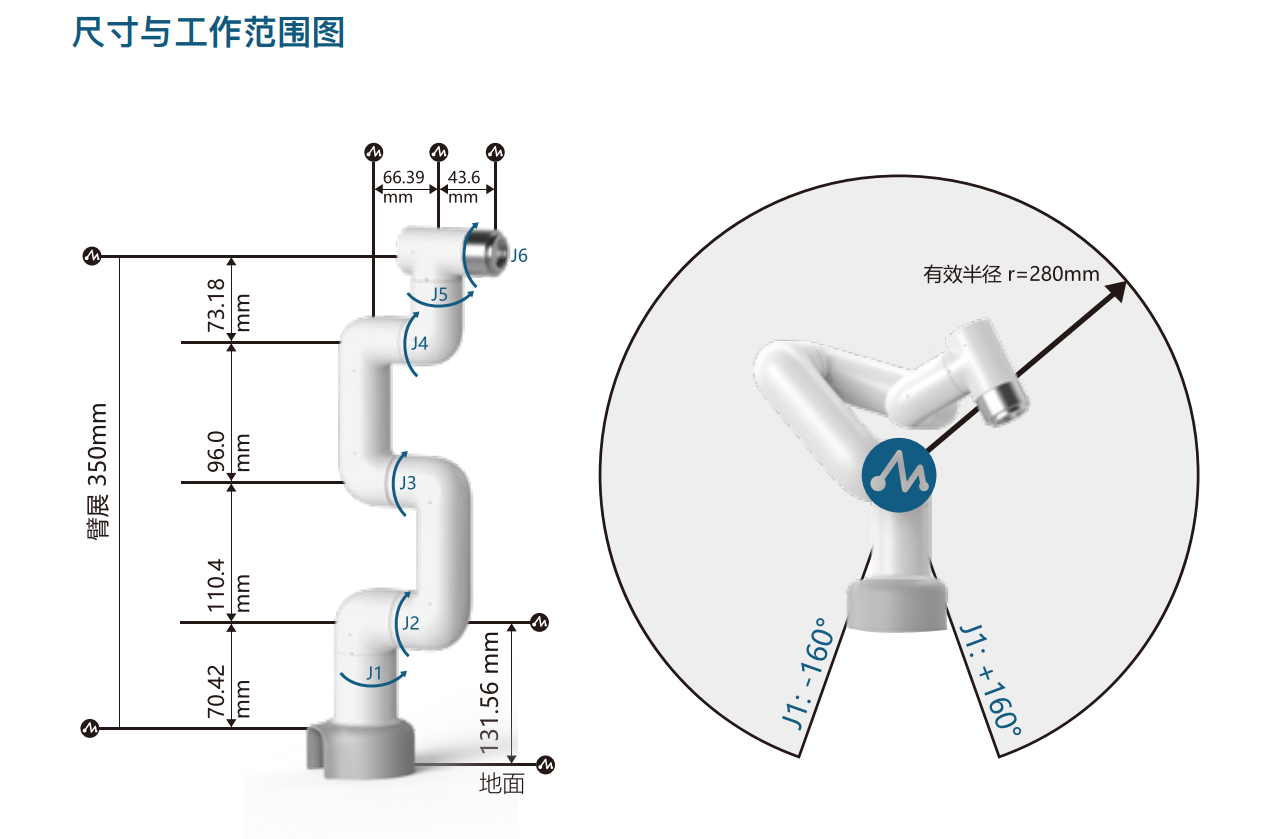
机械臂介绍:树莓派六轴协作机器人,臂展280mm,采用树莓派微处理器,体积小巧但功能强大,支持多平台二次开发,内置Ubuntu系统,无需搭配PC主控,链接外设,即可快速构建机械臂编程教育、机械臂控制逻辑开发, ROS仿真实验,满足科研教育、智能家居、轻工业及商业应用等多种应用场景。

树莓派原生硬件接口,支持4路USB,2路HDMI,标准化GPIO接口。数十种官方执行器,末端接口可接各种传感器,实现颜色识别追踪,二维码以及手势识别、语音播报等。

支持c++、c#、Python和mind+、myblockly图形化编程等多种编程语言。

一体化独特工业设计,整体机身结构紧凑,可快速拆卸更换,实现即插即用。

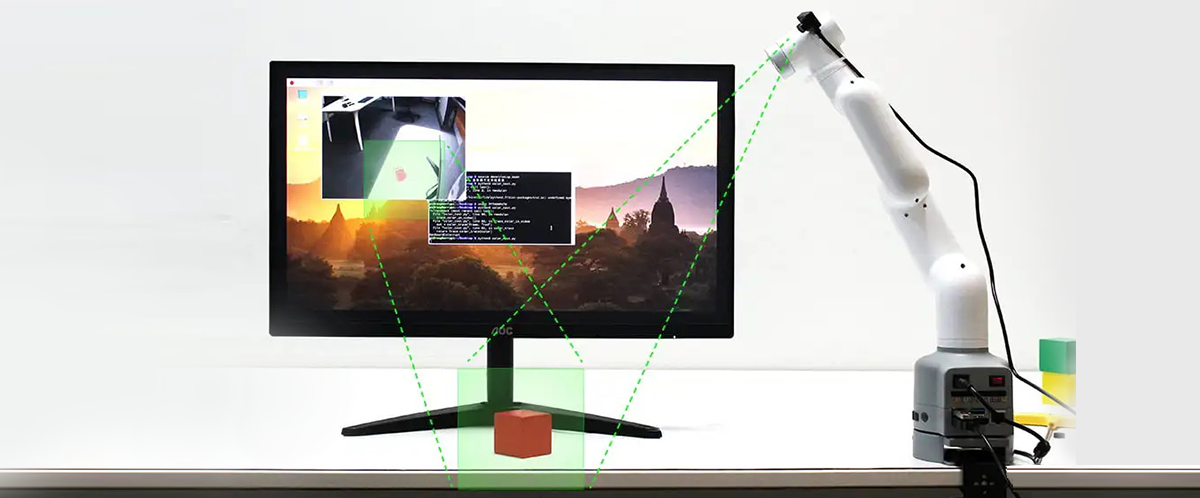
自带图像识别算法,可选配任意摄像头;自主搭配显示器、夹爪吸泵等不同配件,实现更多应用化场景。
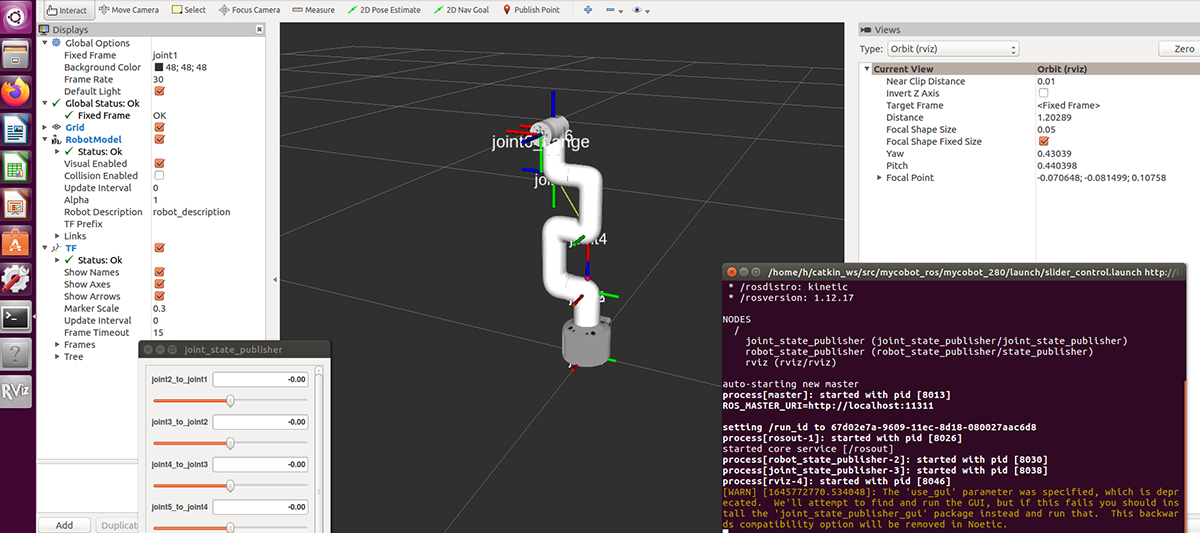
自带ROS应用环境,通过Ubuntu系统,简化6自由度串行总线航机复杂运动控制。
内含6个高性能伺服电机,响应快,惯量小,转动平滑。底座及末端带有乐高科技件接口,适用于各项微型嵌入式设备开发。
平面底盘使用说明(适用平整光滑表面):
1.在底座的四角安装吸盘并拧紧。
2.用附带的乐高科技件,连接平面底座和机械臂底部。
3.将四个吸盘固定在平整光滑平面后方可开始使用。可以适当在吸盘下加入少量不导电液体,以填补吸盘与桌面的缝隙,以获得最佳吸附效果。



技术规格
- 重复定位精度:±0.5mm
- 电源输入:8V-12V,5A
- 通信:Type-C
- 工作半径:280mm
- 自由度:6
- 负载:250g
- SOC:Broadcom BCM2711
- CPU:1.5GHz四核
- 蓝牙/无线:支持
- USB:USB3.0x2; USB2.0 x2
- HDMI接口:microHDMI x2
- IO接口:40
- 适用于:独立工作
- 编程平台:Debian/ Ubuntu
- ROS/ Python:内嵌
- 图形化编程:内嵌
- 搭载摄像头:选配任意摄像头
- 重量:850g
- 工作温度:-5 ~ 45°
配送清单
- 树莓派六轴机械臂x1
- 长方形夹x1
- 底座x1
- 电源适配器x1
- Type-c连接线x1
- 螺丝安装包x1
- 内六角扳手x1
- 跳线若干
 全部商品分类﹀
全部商品分类﹀














